
{kind=link}
Have you ever had one of those days where no matter how many times you go around the block, you can never seem to find a spot? Where every time you pass a car, it seems the owner is about to leave- but you’re a little too late. Perhaps those woes may be a thing of the past, as BMW plans to integrate some of their clever ConnectedDrive technology in order to develop parking prediction. While the future ahead may bring us things like automated cars, it may also hold things that all of us can appreciate.

BMW is further expanding its position as a premium mobility provider, with intelligent services and applications like ChargeNow, ParkNow or intermodal navigation. Now, with the Dynamic Parking Prediction research project, the BMW Group is demonstrating a solution that will in future be able to shorten the search for vacant on-street parking, particularly in cities. Together with its partner INRIX, BMW will present a research prototype of this application at TU-Automotive Detroit (formerly Telematics Detroit), in a BMW i3.

One major sub-cluster of connected vehicle technology from BMW is Connected Navigation, where the RTTI Real-Time Traffic Information system is already helping drivers cope more effectively, more safely and more conveniently with today’s driving challenges by providing them with accurate early warning of congestion and hold-ups and informing them of alternative routes. Now, the new research project Dynamic Parking Prediction is able to predict parking availability using movement data from vehicle fleets. In this way the application is able to shorten the search for vacant on-street parking, particularly in cities, and provides an effective way of reducing parking-related traffic.
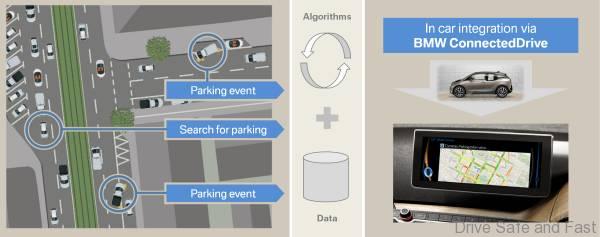
It’s been in the works for close to 4 years now. For the purposes of this project, up-to-date digital maps were produced showing all public parking spaces, while several thousand vehicles from a test fleet supplied anonymous movement data generated when using these spaces. Data was supplied by fleet vehicles both when leaving a parking space and also when searching for a space. Based on the digital map, the local prediction algorithm and the parking data from the fleet vehicles, the research application calculates current parking options in a given area, for example a particular part of town.

This information is then presented on the dashboard display. The number of currently vacant parking spaces and the number of drivers looking for parking are both factored into the calculation. Even when the system is restricted to using data just from the fleet vehicles it achieves reliable results – and prediction accuracy increases in step with the number of vehicles supplying data. In this way Dynamic Parking Prediction will be able to help BMW drivers obtain exactly the information they need to home in on parking areas where fewer other road users are simultaneously searching for parking. This will ease pressure on both drivers and local residents.
